Para los millones de estadounidenses con problemas de movilidad, preparar una pizza puede ser mucho más difícil que simplemente elegir entre pepperoni o salchicha. Ahora, investigadores de Virginia Tech han desarrollado un brazo robótico con novedosas pinzas de asistencia que pueden ayudar a las personas con discapacidad a realizar tareas cotidianas complejas, como preparar una pizza. Los resultados de la investigación, que puede aumentar la independencia de las personas con movilidad limitada, se publicaron en Soft Robotics.
La creación de nuevas herramientas que puedan imitar los movimientos de los usuarios humanos es obra de Dylan Losey y Michael Bartlett, ambos profesores asociados de ingeniería mecánica. “Nuestra filosofía es que, si se va a proporcionar a alguien un robot que pueda ayudarle, debe tener una conexión con la forma en que una persona realiza la misma tarea”, afirmó Losey.
Esto hace que las acciones del robot sean más una extensión de los movimientos naturales de una persona. No basta con construir sistemas robóticos funcionales; estos deben ser fáciles de usar e intuitivos. Con más de 600.000 dólares en financiación y con la ayuda de investigadores estudiantes de posgrado como Maya Keely y Yeunhee Kim, el equipo creó una pinza que puede levantar y mover objetos que varían en tamaño desde un grano de arena hasta una jarra pesada de agua, y todo lo demás, incluidos los ingredientes de una pizza.
El postre primero
La robótica puede aumentar la independencia de las personas con discapacidad al ayudarlas con las tareas cotidianas, pero a los robots a menudo les cuesta seguir el ritmo de la variedad de tareas que se les pide, especialmente a la hora de preparar la cena. Los alimentos son diversos, con diferentes tamaños, formas y texturas, por lo que el mismo robot capaz de abrir un frasco de salsa, por ejemplo, podría tener dificultades para espolvorear queso rallado. ¿Cómo se le enseña a un robot la diferencia entre un plátano y una botella de kétchup?
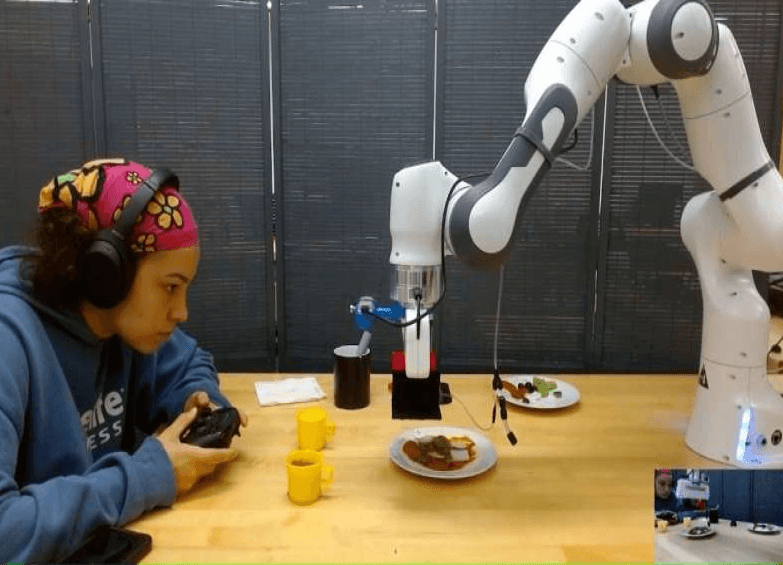
En su trabajo reciente, el equipo programó el robot para recibir comandos de un joystick similar al que se usa en un videojuego. Mediante inteligencia artificial (IA), el robot comenzó a interpretar los comandos para descifrar lo que el humano intentaba hacer y luego utilizó esos datos para completar el resto de la tarea.
El equipo decidió empezar con algo divertido: usar una mano robótica del laboratorio de Losey para construir un helado. El primer intento no salió bien.
“Una de las razones por las que fue difícil es que, tradicionalmente, los robots aprietan cosas”, dijo Losey. “Eso funciona de maravilla con algo como una botella de jarabe, pero cuando se trata de cosas más pequeñas, como chispas o malvaviscos, no es tan fácil simplemente apretarlo todo y esperar que todo salga bien”.
Parte del problema residía en el material de la pinza robótica. Cuando una pinza está hecha de materiales puramente blandos, puede manipular objetos irregulares o pesados. Cuando está hecha de materiales más rígidos, a menudo no puede sujetar objetos pequeños o grupos de objetos.
El equipo de Losey y Bartlett decidió construir una combinación de ambos: robótica rígida con una pinza blanda en su punto de contacto. Aprovechando el trabajo de Bartlett en materiales blandos y adhesivos con propiedades únicas, el equipo implementó los llamados adhesivos conmutables, que “pueden ser fuertes y adhesivos para recoger objetos, pero también pueden desactivarse fácilmente para soltarlos”, explicó Bartlett.
El equipo creó una punta de dedo suave, similar a una burbuja, para la mano robótica. Esta punta se desinfla un poco al entrar en contacto con un objeto, creando una unión adhesiva. Al añadir un poco más de aire, la unión se libera. Con adhesivos intercambiables, el robot logró preparar un helado sundae con chispas y todo.
La pizza siempre es la mejor respuesta
El siguiente plato en el menú: pizza.
“Que el brazo robótico y la pinza colaboren con una persona para armar una pizza realmente retó todos los aspectos de nuestro sistema”, dijo Bartlett. “Las pizzas tienen masa y queso de diferentes tamaños. También tienen salsa e ingredientes de diferentes texturas. La pizza también es un buen caso de estudio porque cada persona quiere ingredientes diferentes en su propia pizza, lo que la hace muy personal. Esto significa que el humano y el robot deberán coordinarse para que el robot construya la pizza que el operador realmente desea, utilizando lo que ha aprendido sobre el movimiento de las diferentes piezas”.
Con la ayuda de un humano, la mano robótica tomó la bandeja de pizza, un metal duro. Luego extendió la masa de la base, un material blando. A continuación, añadió salsa, pepperoni, pimientos, aceitunas y queso. Las yemas adhesivas de los dedos cumplieron su función, y el robot preparó la pizza con éxito.
Este logro culinario subraya el objetivo principal de la subvención de la Fundación Nacional de Ciencias: avanzar fundamentalmente en la tecnología robótica para que las personas con discapacidades puedan realizar una gama más amplia de tareas.
“A largo plazo, nos encantaría crear robots que pudieran recoger cualquier tipo de objeto”, dijo Losey. “Podrían ser blandos, rígidos, grandes, pequeños o de diferentes texturas. Si necesitas un robot que te ayude en tus tareas diarias, sería fantástico que ese robot pudiera ayudarte a preparar el almuerzo o ese helado que tanto deseas”.
Fuente: Tech Xplore.