Si cortas la mayoría de los robots por la mitad, te quedas con costosos restos. Si cortas este, las piezas siguen caminando. Estos impresionantes nuevos conceptos de robots son lo que los investigadores de la Universidad Northwestern denominan “metamáquinas con patas”.
En esencia, se trata de enjambres de módulos autónomos que se acoplan para formar cuerpos más grandes. En lugar de considerar el daño como una falla terminal, este sistema simplemente lo ve como un cambio de lógica: puede perder sus patas, cambiar de forma y aun así desplazarse por el mundo físico.
Un robot hecho de robots
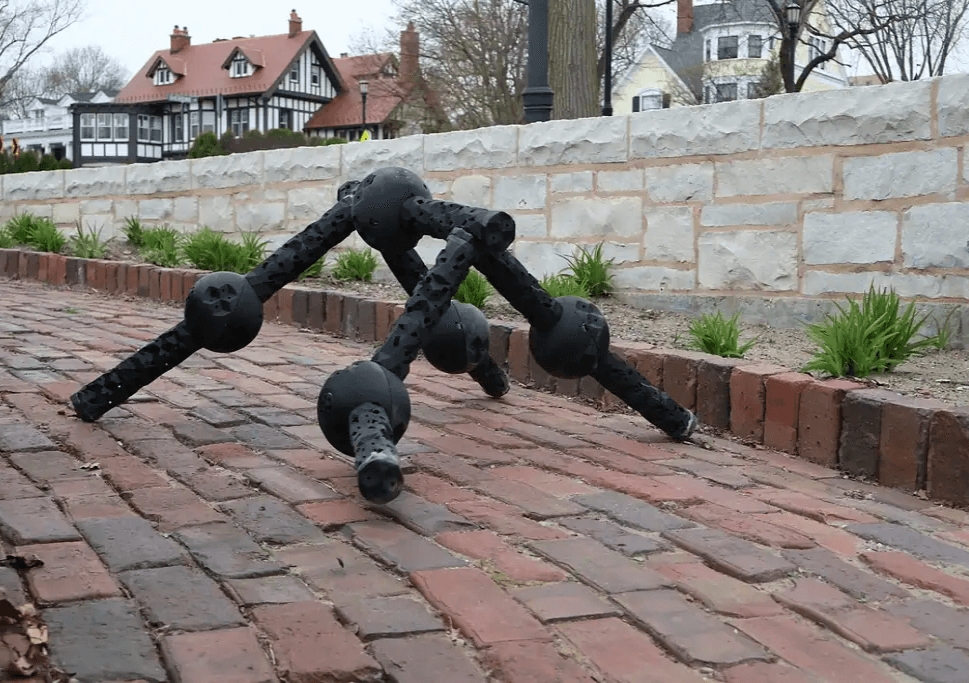
La mayoría de los robots dependen de un “cerebro” central y una estructura rígida. Si una pierna se rompe, la misión termina o se ve gravemente afectada. Pero estas metamáquinas no se rigen por esas reglas. Cada módulo es un robot autónomo equipado con su propia batería, computadora, motor y sensores, todo ello integrado en una pequeña esfera con dos extremidades.
Un solo módulo puede rodar, girar y saltar por sí solo. Pero al acoplarse, se convierten en una metamáquina capaz de realizar movimientos complejos y coordinados. Dado que cada parte es un agente funcional, un módulo separado nunca se convierte en chatarra, sino simplemente en un robot más pequeño e independiente.
El artículo describe una amplia gama de configuraciones posibles para grupos de dos a cinco módulos. Esto permitió a los investigadores explorar cuerpos que no se ajustan a los modelos robóticos convencionales. En lugar de recurrir a un perro, un humanoide o una plataforma con ruedas, trabajaron con un sistema en el que las piernas, las colas y la columna vertebral pueden surgir del mismo bloque de construcción repetitivo.
Si este concepto suena un poco extraño, bueno, en cierto modo lo es. No fue diseñado por humanos.
Diseñado por IA

Para descubrir cómo ensamblar estos bloques, el equipo de Northwestern recurrió a la inteligencia artificial. En lugar de que ingenieros humanos diseñaran los planos, la IA simuló un proceso darwiniano de mutación y selección. Generó miles de formas, puso a prueba su agilidad en un mundo virtual y conservó solo las de mejor rendimiento.
Algunos de los resultados son francamente extraños. Algunos se mueven con el andar torpe de una foca; otros se contorsionan como lagartos. No son las máquinas simétricas y pulidas a las que estamos acostumbrados. Parecen toscas e improvisadas, pero son increíblemente efectivas porque fueron seleccionadas por su eficiencia, fruto de un proceso de ensayo y error.
“Simulamos el proceso darwiniano de mutación y selección dentro de un entorno físico virtual”, declaró Sam Kriegman en el comunicado de Northwestern. “Se trata de la supervivencia del más apto, acelerada por ordenadores y materializada mediante bloques de construcción modulares propios del deporte”.
Luego, por supuesto, los investigadores procedieron a probarlos en el mundo real.
La prueba real

Muchos sistemas robóticos lucen impresionantes en simulaciones o en superficies interiores controladas. La prueba más difícil llega al aire libre, donde el terreno es impredecible, aparecen obstáculos en ángulos extraños y la tracción cambia con cada paso.
Las metamáquinas se probaron en terrenos irregulares, como hierba, grava, arena, barro, hojas, raíces de árboles y ladrillos desiguales. Según el artículo, transfirieron los comportamientos aprendidos en la simulación al mundo físico sin necesidad de ajustes adicionales.
Los robots también realizaron diversos tipos de movimiento. Podían enderezarse solos tras volcarse, saltar obstáculos y girar en el aire. Todos los diseños físicos construidos en el estudio aprendieron a realizar giros con salto, una maniobra que requiere que la máquina se oriente antes de aterrizar.
El resultado más sorprendente se produjo cuando los robots sufrieron daños. Demostraron que podían seguir moviéndose incluso bajo diferentes condiciones de daño. Por ejemplo, el artículo describe una metamáquina de tipo cuadrúpedo que conservó su capacidad de locomoción incluso después de amputaciones severas. A medida que se desprendían más módulos, el cuerpo restante seguía moviéndose. Incluso las partes separadas no eran inertes; dado que cada módulo seguía siendo un robot autónomo, podía continuar actuando de forma independiente.
“Pueden sobrevivir a ser cortados por la mitad o divididos en muchos pedazos. Una vez separados, cada módulo dentro de la metamáquina puede convertirse en un agente individual”, agregó Kriegman.
Todavía un prototipo

Todavía no hemos llegado a la etapa de Terminator. Estas máquinas aún no pueden reconfigurarse por completo, absorber automáticamente nuevos módulos ni reconstruirse tras sufrir daños sin ayuda externa. Además, su capacidad de detección es principalmente interna, centrada en la posición y el movimiento del cuerpo en lugar de una percepción profunda del mundo exterior.
Aun con esas limitaciones, el estudio apunta hacia un futuro diferente para la robótica. Este campo a menudo ha considerado la fragilidad como un precio a pagar por la velocidad, la agilidad o la especialización. Las metamáquinas de Northwestern sugieren otro camino: construir robots que asuman que el mundo será hostil, que las piezas fallarán y que la supervivencia es tan importante como el rendimiento.
Aun así, el estudio sugiere un cambio de enfoque, alejándose de las máquinas frágiles y avanzando hacia robots capaces de absorber daños y mantenerse en movimiento. La próxima generación podría llegar a nosotros tambaleándose (en lugar de caminando).
El estudio fue publicado en las Proceedings of the National Academy of Sciences.
Fuente: ZME Science.