Los robots basados en materiales blandos suelen ser mejores para replicar la apariencia, los movimientos y las habilidades tanto de humanos como de animales. Si bien en la actualidad existen innumerables robots blandos, muchos de ellos son difíciles de producir a gran escala debido al alto coste de sus componentes o a su complejo proceso de fabricación.
Investigadores de la Universidad de Coimbra en Portugal desarrollaron recientemente una nueva mano robótica suave que podría ser más asequible y más fácil de fabricar. Su diseño, introducido en Cyborg and Bionic Systems, integra actuadores blandos con un exoesqueleto, los cuales pueden producirse mediante técnicas escalables.
“La mayoría de los robots están hechos de materiales rígidos”, dijo a Tech Xplore Pedro Neto, uno de los investigadores que realizó el estudio. “Sin embargo, cuando observamos a los animales, notamos que sus cuerpos pueden estar compuestos de partes duras (esqueletos) y partes blandas (como músculos). Algunos animales, como las lombrices de tierra, tienen un cuerpo completamente blando. Inspirándonos en la naturaleza, anticipamos “La próxima generación de robots incorporará componentes fabricados con materiales blandos o, en algunos casos, podrán tener un cuerpo totalmente blando”.
En comparación con los robots rígidos, los sistemas robóticos blandos podrían ser más seguros y coexistir mejor con humanos o animales tanto en entornos interiores como exteriores. Por ejemplo, si chocan con humanos, animales u objetos a su alrededor, es menos probable que estos robots causen daños o lesiones importantes.
El objetivo clave del trabajo reciente de Neto y sus colegas fue desarrollar una nueva mano robótica suave que sea segura y asequible. En teoría, una mano así sería más fácil de implementar a gran escala, lo que impulsaría nuevas investigaciones e innovaciones en el campo de la robótica.
“Aprovechamos el análisis de elementos finitos para optimizar el diseño antes de fabricar físicamente la mano, reduciendo los costos de creación de prototipos”, explicó Neto. “La utilización de la impresión 3D normal resultó eficaz al imprimir directamente algunos componentes en materiales blandos e imprimir moldes en materiales rígidos”.
La suave mano robótica creada por Neto y sus colegas se basa en varios materiales diferentes. Su estructura cuidadosamente diseñada pretendía replicar la apariencia y funcionalidad de las manos humanas, reproduciendo sus movimientos y habilidades.
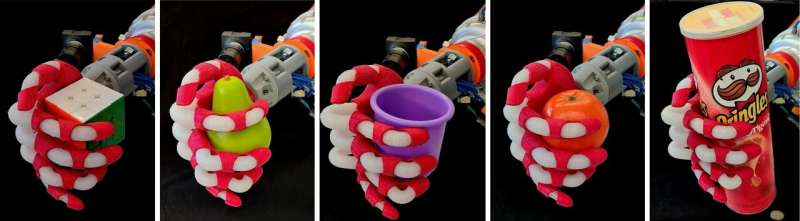
“La configuración de la mano robótica consta de cinco actuadores blandos, cada uno correspondiente a un dedo, y un exoesqueleto para promover la flexibilidad del dedo”, dijo Neto. “Un controlador ON-OFF mantiene los ángulos de flexión de los dedos especificados, lo que permite que la mano agarre eficazmente objetos de diferentes formas, pesos y dimensiones”.
Hasta ahora, los investigadores evaluaron el rendimiento de su mano robótica en una serie de simulaciones y experimentos. Los resultados iniciales son muy prometedores, ya que la mano podría agarrar con éxito numerosos objetos de diferentes formas, pesos y tamaños.
“El principal aporte es el sistema integrado de diseño y fabricación que utiliza análisis de elementos finitos para optimizar el diseño antes de su fabricación”, afirmó Neto. “Este logro tiene el potencial de aumentar la accesibilidad de las manos robóticas suaves al tiempo que reduce los costos y elimina los procedimientos de diseño y fabricación que normalmente consumen mucho tiempo, que con frecuencia dependen de flujos de trabajo iterativos que consumen muchos recursos”.
En el futuro, la suave mano robótica desarrollada por este equipo de investigadores podría ser utilizada tanto por equipos académicos como por robóticos individuales para probar nuevos algoritmos de inteligencia artificial (IA) y otras herramientas computacionales destinadas a mejorar las habilidades de los robots. Además, su diseño podría abrir nuevas vías para la fabricación de robots humanoides de bajo coste que puedan ayudar a los humanos en sus actividades cotidianas.
“Nuestros próximos estudios se centrarán en mejorar la fabricación de sensores y actuadores blandos, con el objetivo de mejorar la accesibilidad de los robots blandos a un público más amplio”, añadió Neto. “El control de robots blandos mediante inteligencia artificial es otro tema de investigación en el que estamos trabajando”.
Fuente: Tech Xplore.