Imagina una goma elástica que se convierte en un cable de acero al recibir una orden. Ahora imagina que está dentro de un robot.
Ese es el principio básico de un nuevo músculo artificial desarrollado por investigadores del Instituto Nacional de Ciencia y Tecnología de Ulsan (UNIST) en Corea del Sur. En un estudio publicado en Advanced Functional Materials, describen un músculo blando, controlado magnéticamente, que puede alternar entre una contracción flexible y una firme, y que proporciona más energía de la que jamás podría generar el tejido muscular humano.
En su estado rígido, esta diminuta tira de material pesa aproximadamente 1,2 gramos, pero puede soportar hasta 5 kilogramos. Esto equivale a unas 4000 veces su propio peso. Al ablandarse, puede estirarse hasta unas 12 veces su longitud original y contraerse con una deformación del 86,4%, más del doble que la de un músculo humano típico.
La densidad de trabajo del músculo —la cantidad de energía mecánica que puede generar por unidad de volumen— alcanza los 1150 kilojulios por metro cúbico. Esto es aproximadamente 30 veces mayor que la del tejido muscular humano. Para la robótica blanda, es como pasar de un patinete a una moto deportiva de la noche a la mañana.
¿Por qué es tan difícil construir músculos robóticos?
Si alguna vez has visto vídeos de robots blandos —como tentáculos flexibles, pinzas inflables o gusanos de silicona— probablemente hayas notado un patrón. Son excelentes para doblarse y retorcerse. No son tan buenos, por ejemplo, para levantar algo pesado sin derrumbarse.
Esto se debe a que la mayoría de los músculos artificiales presentan una desventaja: pueden ser muy elásticos o muy resistentes, pero rara vez ambas cosas a la vez. Los materiales blandos, como los geles y los elastómeros, pueden deformarse considerablemente, pero no generan mucha fuerza. Los materiales más rígidos pueden ejercer una gran fuerza de tracción, pero solo en distancias cortas. Cuando los ingenieros intentan aplicar ambas características simultáneamente —gran deformación y gran fuerza— el material suele desgarrarse, atascarse o fatigarse.
Los investigadores miden este compromiso con la densidad de trabajo. Muchos músculos artificiales blandos alcanzan valores de deformación respetables, entre el 40 y el 60%, pero solo densidades de trabajo modestas. Los hidrogeles, los polímeros con memoria de forma, los elastómeros de cristal líquido y las fibras trenzadas ocupan distintos puntos de este espectro. Cada tecnología tiene sus ventajas, pero ninguna se comporta como un músculo biológico, que puede estirarse, contraerse y soportar peso repetidamente sin desintegrarse.
Además, la rigidez es importante. Un músculo artificial útil debería poder relajarse cuando necesita moverse y contraerse cuando necesita sujetar algo; piensa en cómo tu brazo puede relajarse o tensarse. La mayoría de los músculos artificiales no hacen eso. Permanecen blandos o rígidos todo el tiempo.
Este es el problema de fondo con el que se topó el equipo del UNIST: ¿cómo se construye un músculo que pueda ser suave y fuerte, elástico y potente, y a la vez controlado desde el exterior?
Un músculo hecho de plástico, imanes y memoria
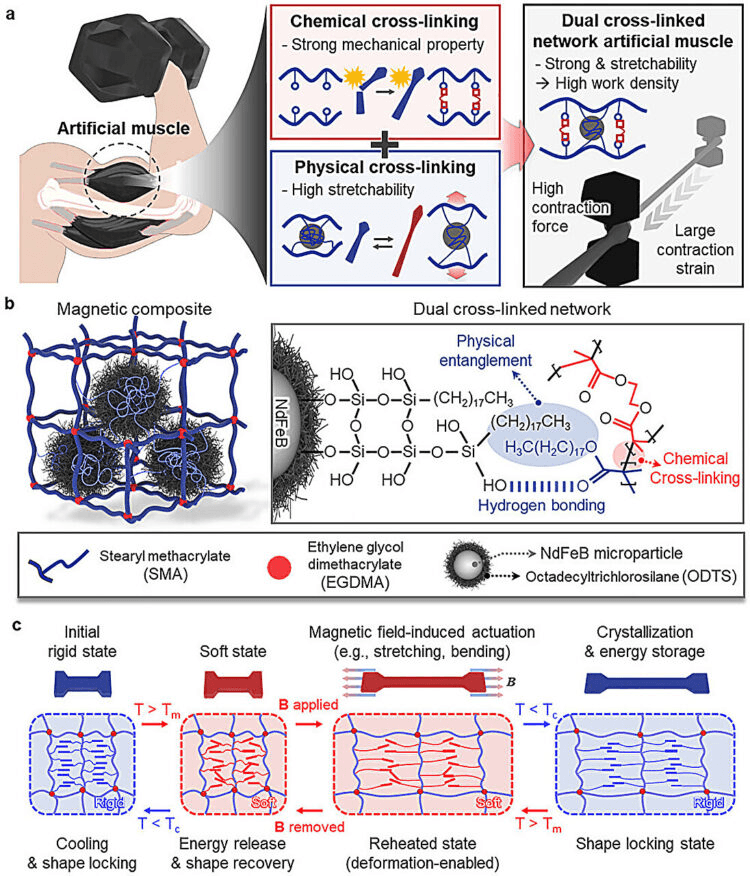
La respuesta del grupo del UNIST es un polímero magnético con memoria de forma que presenta una doble personalidad a nivel molecular. Su núcleo es un plástico denominado polímero con memoria de forma. Estos materiales pueden “programarse” para adoptar una forma temporal y luego recuperar su forma original al calentarse. En este caso, el polímero base es el metacrilato de estearilo, reticulado con una pequeña cantidad de otra molécula, el dimetacrilato de etilenglicol.
Los investigadores crearon dos redes superpuestas en este polímero. Una es una red química de enlaces covalentes permanentes. La otra es una red física de largas cadenas laterales que pueden cristalizar y fundirse. Cuando las cadenas laterales cristalizan, el material se vuelve rígido y vítreo. Cuando se funden, se ablanda adquiriendo un estado elástico y gomoso.
Este diseño de doble reticulación permite que el músculo ajuste su rigidez a demanda. En pruebas de laboratorio, su rigidez pasa de unos 213 kilopascales —blanda, como la goma— a 292 megapascales, cientos de veces más rígida, similar al plástico duro. Esto supone un cambio de más de mil veces.
Luego, el equipo añadió la superpotencia: los imanes. Incrustaron diminutas micropartículas de neodimio-hierro-boro en todo el polímero. Antes de introducirlas en el plástico, recubrieron las partículas con una fina capa de sílice y una capa de octadeciltriclorosilano, un compuesto organosilícico cuyo nombre es complejo y que, básicamente, hace que sus superficies sean compatibles con el polímero. Este tratamiento superficial ayuda a que las partículas se dispersen uniformemente y se integren en la red física en lugar de aglomerarse.
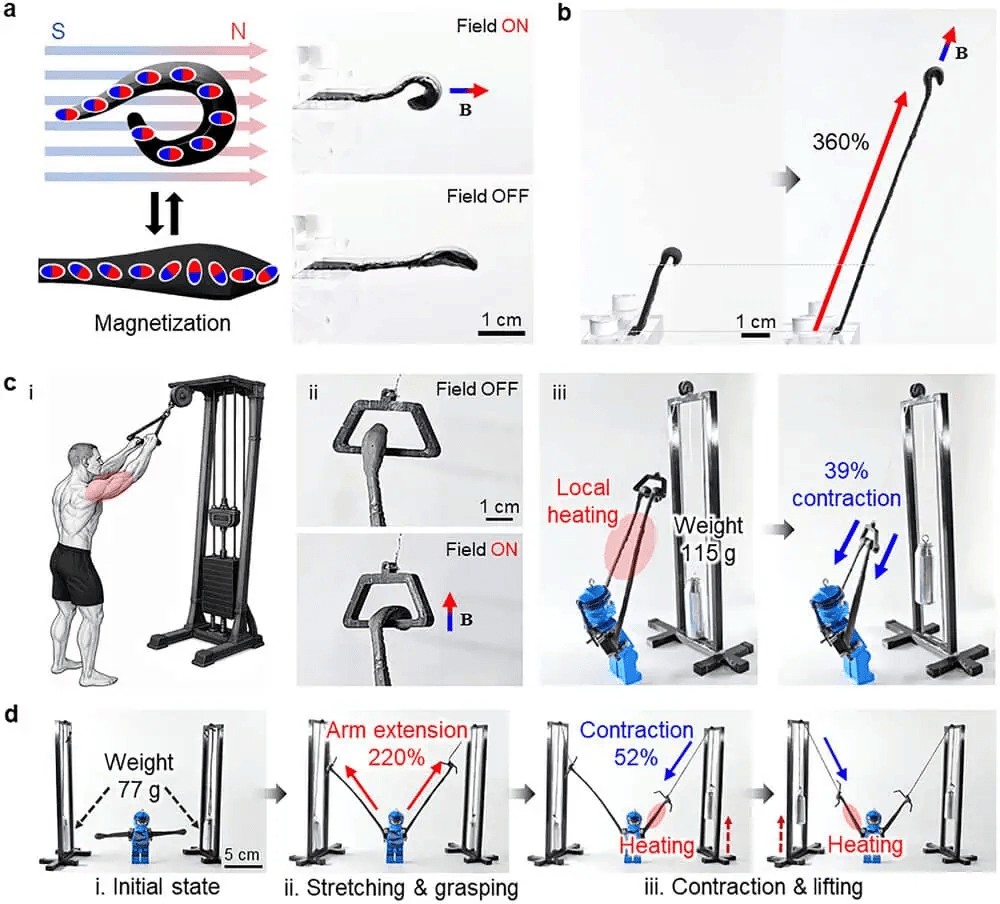
Una vez curado, el composite tiene el aspecto de una simple tira flexible. Sin embargo, es termosensible —se endurece y se ablanda con la temperatura— y magnetoactivo, reaccionando a campos magnéticos externos. El músculo puede “magnetizarse” adoptando una forma específica, curvada o doblada, al exponerlo a un campo magnético intenso mientras está blando y luego enfriarlo para fijar dicha configuración. En su interior, las micropartículas se alinean, confiriendo a la tira una dirección magnética intrínseca, una especie de memoria muscular basada en el magnetismo.
Así pues, cuando el material se recalienta por encima de su temperatura de transición, se ablanda y puede moverse bajo la acción de un campo magnético: doblarse, torcerse o estirarse, según cómo se aplique el campo. Al enfriarse, recupera su forma original.
Aquí es donde las cifras se vuelven asombrosas. En pruebas controladas, el material alcanzó una elongación a la rotura del 1274%. Esto significa que se extendió más de doce veces su longitud antes de romperse. También mostró una deformación por actuación del 86,4% en condiciones de trabajo, más del doble que la del músculo humano. Y su densidad de trabajo alcanzó los 1150 kilojulios por metro cúbico con una densidad de reticulación óptima.
En su estado rígido, una tira de aproximadamente 1,25 gramos podía soportar una carga de 5 kilogramos sin romperse. En su estado blando, aún soportaba un kilogramo —más de 800 veces su propio peso— y conservaba la capacidad de moverse y estirarse.
Como lo expresó el profesor Hoon Eui Jeong en el comunicado de prensa del UNIST: “Esta investigación supera la limitación fundamental de los músculos artificiales tradicionales, que son o bien muy elásticos pero débiles, o bien fuertes pero rígidos. Nuestro material compuesto puede hacer ambas cosas, abriendo la puerta a robots blandos más versátiles, dispositivos portátiles e interfaces hombre-máquina intuitivas”.
Lo que estos músculos realmente pueden hacer
Una cosa es batir récords en una curva de tensión-deformación, y otra muy distinta es comportarse como un músculo. Por eso, el equipo organizó algunas demostraciones robóticas.
En un experimento, moldearon una tira para crear una especie de brazo y mano robóticos. La magnetizaron en una configuración curva para que, bajo un campo magnético, la mano pudiera cerrarse alrededor de una barra. Tras ablandar el material con un láser infrarrojo, utilizaron imanes para crear el agarre de la mano. Al enfriarla, el agarre quedó fijo. Luego, recalentaron únicamente el segmento del brazo. El polímero recordó su longitud original y se contrajo, levantando un peso de 115 gramos con una recuperación de la deformación de aproximadamente el 39 %. Para extenderlo de nuevo, podían dejar que el peso suspendido lo jalara o volver a aplicar un campo magnético.
En otra prueba, estiraron previamente dos músculos hasta duplicar su longitud y los usaron como brazos paralelos para levantar cargas de 77 gramos a cada lado. Al calentarse, los músculos se contrajeron y levantaron las pesas, recuperando aproximadamente la mitad de su tensión inicial.
Se trata de experimentos de prueba de concepto, no de dispositivos comerciales terminados. Sin embargo, demuestran una combinación inusual de características en un solo material. Este material puede reprogramarse magnéticamente para adoptar nuevas formas sin necesidad de refabricación. Puede modificar su rigidez mediante cambios de temperatura. Puede levantar cargas pesadas en relación con su peso. Y puede generar grandes deformaciones reversibles durante numerosos ciclos.
En el ámbito más amplio de los músculos artificiales, esto es poco común. Muchos sistemas que dependen de la presión neumática o los campos eléctricos requieren componentes voluminosos como bombas, compresores o fuentes de alimentación de alto voltaje. Otros, como los hilos de nanotubos de carbono y las fibras trenzadas, destacan en un parámetro específico, como la velocidad, la potencia o la deformación, pero no los combinan todos. En este caso, el componente principal es una tira de plástico inteligente con imanes en su interior.
Desde exoesqueletos de ciencia ficción hasta tentáculos quirúrgicos
Entonces, ¿qué se podría hacer realmente con un músculo como este? Bueno, imagínate exoesqueletos que se sientan como ropa en lugar de armadura, herramientas quirúrgicas que se doblen delicadamente alrededor de los órganos, robots domésticos que no te aplasten los dedos cuando agarren cosas a tu alrededor.
Este nuevo material apunta directamente a ese futuro. Gracias a su capacidad de ablandarse al moverse y endurecerse al sujetar, resulta ideal para dispositivos de asistencia portátiles, robots humanoides e instrumental médico. Imagina un guante que ayude a levantar el brazo y se relaje al descansar, o un catéter flexible que se endurezca al colocarse y luego se relaje para su extracción. Incluso podría utilizarse para crear empuñaduras e interfaces adaptables que se ajusten a objetos frágiles y se bloqueen para transportarlos. También se inscribe en una tendencia más amplia en robótica, que se aleja de las máquinas industriales rígidas y se orienta hacia sistemas suaves y flexibles que pueden operar de forma segura cerca de las personas, en hogares, hospitales y entornos impredecibles.
Por supuesto, existen limitaciones. El sistema actual aún depende del control térmico, lo que implica calentar y enfriar el material para cambiar de estado. Esto puede limitar la velocidad y la eficiencia energética, especialmente fuera de un baño de agua de laboratorio. Las versiones futuras podrían emplear métodos de calentamiento más eficientes o modificar la química del polímero para que el cambio se produzca a temperaturas más convenientes. La actuación magnética también presenta desafíos en cuanto a alcance y escalabilidad. Los dispositivos muy pequeños funcionan bien con imanes, pero para controlar sistemas grandes podrían requerirse campos más intensos o diseños ingeniosos.
Y luego está la durabilidad en el mundo real. Si bien el material resistió bien durante cientos de ciclos de laboratorio, el uso a largo plazo en un guante robótico o un dispositivo implantado requeriría miles o millones de ciclos, exposición al sudor o fluidos corporales y un abuso mecánico constante. Sin embargo, la física básica de lo que demostró el equipo —un músculo blando que puede comportarse como goma en un instante y como plástico estructural al siguiente, superando con creces la capacidad de levantar tejido humano— es un hito importante. Los músculos artificiales siempre han estado al margen de la ciencia ficción. Imaginamos trajes motorizados, extremidades sintéticas, robots flexibles reconstruyendo zonas de desastre, diminutas máquinas desplazándose dentro del cuerpo. La mayoría de estas visiones se topan con el mismo obstáculo: se necesita algo que se mueva como la carne, pero que funcione como una máquina.
Esta nueva fuerza del UNIST no lo soluciona todo. Pero impulsa ese límite de forma muy concreta. En lugar de elegir entre suavidad y fuerza, simplemente pregunta: ¿por qué no ambas?
Los resultados aparecieron en la revista Advanced Functional Materials.
Fuente: ZME Science.