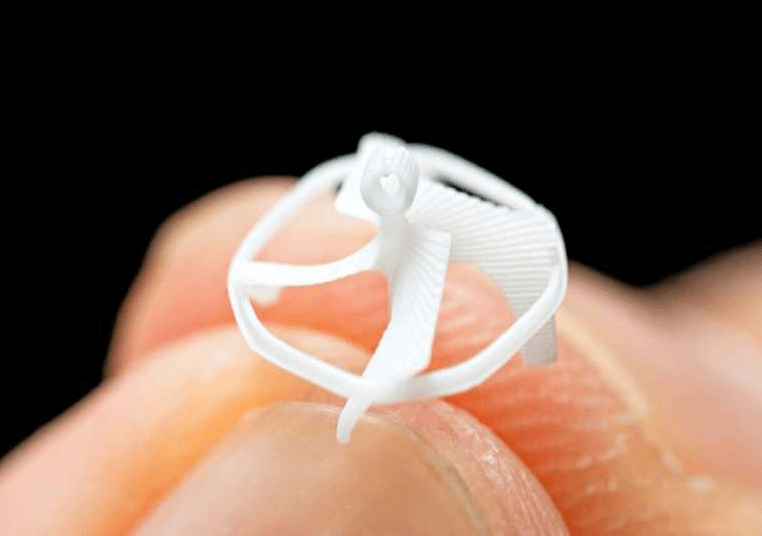
Como un abejorro revoloteando de flor en flor, un nuevo robot volador inspirado en insectos, creado por ingenieros de la Universidad de California en Berkeley, puede flotar, cambiar de trayectoria e incluso alcanzar objetivos pequeños. Con menos de un centímetro de diámetro, el dispositivo pesa tan solo 21 miligramos, lo que lo convierte en el robot inalámbrico más pequeño del mundo capaz de volar de forma controlada.
“Las abejas exhiben notables capacidades aeronáuticas, como la navegación, el planeo y la polinización, que los robots voladores artificiales de escala similar no pueden realizar”, afirmó Liwei Lin, profesor distinguido de Ingeniería Mecánica en la Universidad de California en Berkeley. “Este robot volador puede controlarse inalámbricamente para acercarse y alcanzar un objetivo designado, imitando el mecanismo de polinización cuando una abeja recolecta néctar y se va volando”.
Lin es el autor principal de un nuevo artículo que describe el robot que se publicó el viernes 28 de marzo en la revista Science Advances. Para que un robot pueda volar, debe estar equipado con una fuente de energía, como una batería, y electrónica para el control de vuelo, dos componentes que pueden ser difíciles de integrar en dispositivos muy pequeños y ligeros. Para solucionar este problema, Lin y el equipo de UC Berkeley utilizaron un campo magnético externo para alimentar el dispositivo y controlar la trayectoria de vuelo.
El robot tiene la forma de una pequeña hélice e incluye dos pequeños imanes. Bajo la influencia de un campo magnético externo, estos imanes se atraen y repelen, lo que hace que la hélice gire y genere suficiente sustentación para elevar el robot. La trayectoria de vuelo del robot se puede controlar con precisión modulando la intensidad del campo magnético. El siguiente robot más grande con capacidades de vuelo similares tiene 2,8 cm de diámetro, casi tres veces más grande que el nuevo robot volador.
“Los diminutos robots voladores son útiles para explorar pequeñas cavidades y otros entornos complejos”, afirmó Fanping Sui, coautor principal del estudio y quien recientemente completó un doctorado en ingeniería en la Universidad de California en Berkeley. “Esto podría utilizarse para la polinización artificial o para inspeccionar espacios pequeños, como el interior de una tubería”.
Actualmente, el robot solo puede volar pasivamente. Esto significa que, a diferencia de los aviones o drones más avanzados, no cuenta con sensores integrados que detecten su posición o trayectoria actual y no puede ajustar sus movimientos en tiempo real. Por lo tanto, si bien el robot puede trazar rutas de vuelo precisas, un cambio repentino en el entorno, como un viento fuerte, podría desviarlo de su trayectoria.
“En el futuro, intentaremos añadir un control activo, que nos permitiría cambiar la actitud y la posición del robot en tiempo real”, dijo Wei Yue, coautor principal del estudio y estudiante de posgrado en el laboratorio de Liwei Lin.
El funcionamiento del robot también requiere un potente campo magnético proporcionado por una bobina de campo electromagnético. Sin embargo, al miniaturizar aún más el robot a menos de 1 mm de diámetro (aproximadamente el tamaño de un mosquito), podría ser lo suficientemente ligero como para ser controlado por campos magnéticos mucho más débiles, como los generados por las ondas de radio.
Además del nuevo robot inspirado en un abejorro, el equipo de Lin también ha creado un robot inspirado en una cucaracha que puede correr por el suelo y sobrevivir al pisoteo de un humano. Yue también está trabajando en nuevos robots “de enjambre” que pueden trabajar en equipo como hormigas para realizar tareas que serían imposibles para robots individuales.
“Estoy trabajando con robots a escala de 5 milímetros que pueden arrastrarse, rodar y girar, y que también pueden trabajar juntos para formar cadenas y matrices, o realizar tareas aún más complejas”, dijo Yue. “Podrían usarse en cirugía mínimamente invasiva, ya que podríamos inyectar varios de ellos en el cuerpo y hacer que cooperen para formar stents, extirpar coágulos o realizar otras tareas”.
Fuente: Tech Xplore.